








































































RC Glossary
2.4GHz
The introduction of spread spectrum technology into the world of radio control is without doubt one of the most important advances to occur in the history of the hobby.
The last major shake up of radio control systems was the introduction of Pulse Code Modulation (PCM), somewhere back in the 1980s, which allows the analogue signals being sent out from a standard FM transmitter to be converted to digital signals. This results in a stronger, more positive signal with less chance of interference either from other rc transmitters or 'metallic noise', whereby two metal surfaces inside the model rub together, generating a weak electronic signal that gets picked up by the receiver, causing unwanted servo movement.
Before recent years, RC flyers were on the 72MHz frequency band (and their transmitters all had long antennas with a flag at the tip to help judge wind direction). The problem with this is you had to make sure you were on a different "channel" as any other flyer or bad things would happen. Like, as in, very, very bad things. Think instant loss of control and crash.
But spread spectrum rc technology uses a completely different method of signal transmission and operates within the 2.4GHz frequency band, which is well clear of any of the other bands used for rc and other common radio signal transmissions. This allows flyers to enjoy flying in confidence without fear of another flyer disrupting their precise "channel" no matter how many flyers you can stuff into one flying field. It just doesn't happen with 2.4GHz technology.
This new technology for rc use has been developed from Direct Sequencing Spread Spectrum, a form of secure radio signal transmission that has been in use by top government bodies (military, NASA etc.) for a while. The rc version is fundamentally the same, but it's been tweaked a bit for the hobby industry.
3D
3D refers to a complex form of advanced aerobatic flying. 3D airplanes have over-sized control surfaces, exaggerated control surface deflection and excess power for maximum performance and sensitivity. Many 3D maneuvers are performed at very slow speeds, often with the plane at the point of stall.
Adverse Yaw
Adverse yaw is a term used when the nose of the plane isn't quite pointing in the direction it should be pointing in, as the plane turns. For instance, if you bank left into a turn the nose yaws to the right. A more visually obvious sign of adverse yaw is the tail end of the plane dropping (side-slipping) during the turn.
This adverse yaw occurs because a downward deflected aileron (i.e. the aileron on the outer wing during the turn) causes more drag than the upward deflected aileron, and this drag tries to pull the airplane in the opposite direction of the turn.
For example, if the plane is in a banked turn to the right, there's increased drag on the left hand wing (because of the down aileron) which causes an unwanted yaw to the left, even though the plane is turning to the right.
Aerobatic
Aerobatic refers to any maneuver or series of maneuvers that involve stunts of any kind, such as loops, rolls and spins. An airplane that is capable of performing such stunts is said to be "fully aerobatic".
Aft
Aft in aviation refers to the back or rearward area of an aircraft, or behind the object in question.
"This airplane's baggage compartment is aft of the CG."
Aileron
A hinged flight control surface usually attached to the trailing edge of each wing of a fixed-wing aircraft. Ailerons are used in pairs to control the aircraft in roll, or movement around the aircraft's longitudinal axis. Movement around this axis is called 'rolling' or 'banking'. Usage of ailerons and the elevator help to complete a turn. On basic aircraft without ailerons, rudder is used to turn the aircraft along its lateral axis.
Aileron Differential
Aileron Differential is when the ailerons are set up to move upwards more than downwards, to counteract any adverse yaw during a turn caused by extra drag on the outer wing from the down aileron. Aileron differential simply means that the ailerons move more in one direction than the other, with the greater deflection being upwards. Ailerons that are set up this way are called differential ailerons.
Adverse Yaw
The reason why ailerons are sometimes set up this way is to counteract any adverse yaw when the airplane is turning.
Adverse yaw is a term used when the nose of the plane isn't quite pointing in the direction it should be pointing in, as the plane turns. A more visually obvious sign of adverse yaw is the tail end of the plane dropping (side-slipping) during the turn.
This adverse yaw occurs because a downward deflected aileron (i.e. the aileron on the outer wing during the turn) causes more drag than the upward deflected aileron, and this drag tries to pull the airplane in the opposite direction of the turn.
For example, if the plane is in a banked turn to the right, there's increased drag on the left hand wing (because of the down aileron) which causes an unwanted yaw to the left, even though the plane is turning to the right.
The correct fix for this common issue is to apply a small amount of rudder during the turn in co-ordination with the aileron deflection. It's how real planes are flown and is known as 'coordinated flying'. The deflected rudder forces the nose of the plane round in the direction it's turning, thus acting against the drag and so no tail-drop is seen.
Rudder can be applied manually during the turn (by using the rudder stick!) but a very easy and convenient fix if you have a computer-based transmitter with channel mixing capability is to mix rudder with aileron, so a small amount of rudder is automatically applied when you move the aileron stick.
Setting up some aileron differential is the other fix, particularly if you have an airplane that has a strong tenancy to drop its tail during a turn - some planes do it more than others - and especially if you're flying a plane without rudder control (i.e. aileron & elevator only).
Most computer radios offer an aileron differential programming option if each aileron has its own servo - refer to your transmitter instruction manual for the 'How to...' part. This is the easy fix!
Air Brakes
In aeronautics, air brakes or speedbrakes are a type of flight control surface used on an aircraft to increase drag or increase the angle of approach during landing.
Air brakes differ from spoilers in that air brakes are designed to increase drag while making little change to lift, whereas spoilers reduce the lift-to-drag ratio and require a higher angle of attack to maintain lift, resulting in a higher stall speed.
Airfoil
An airfoil is the cross-section shape of a wing. Airfoils can be flat-bottomed, under-cambered, semi-symmetrical or symmetrical, depending on the style of airplane and what it needs to do. Different shape airfoils have different lift generating properties.
Angle of Attack
The Angle of Attack refers to the angle between the chord line of the wing of a fixed-wing aircraft and the vector representing the relative motion between the aircraft and the atmosphere. Since a wing can have twist, a chord line of the whole wing may not be definable, so an alternate reference line is simply defined. Often, the chord line of the root of the wing is chosen as the reference line.
Critical Angle of Attack
The critical angle of attack is the angle of attack which produces maximum lift coefficient. This is also called the "stall angle of attack". Below the critical angle of attack, as the angle of attack increases, the coefficient of lift (Cl) increases. At the same time, above the critical angle of attack, as angle of attack increases, the air begins to flow less smoothly over the upper surface of the airfoil and begins to separate from the upper surface.
On most airfoil shapes, as the angle of attack increases, the upper surface separation point of the flow moves from the trailing edge towards the leading edge. At the critical angle of attack, upper surface flow is more separated and the airfoil or wing is producing its maximum coefficient of lift. As angle of attack increases further, the upper surface flow becomes more and more fully separated and the airfoil/wing produces less coefficient of lift.

ARF - Almost Ready to Fly
An ARF simply means an aircraft that requires your own choice of electronics to install in the airframe. Most ARF's require you to purchase all of the electronics separately (motor, servos, ESC, and sometimes additional accessories). ARF's are for folks who either prefer a true build process and/or prefer to put their own choice of electronics in the aircraft.
For fiberglass and balsa airplanes from companies like Great Planes, ARF has a different meaning. For these planes, ARF is used to describe an airplane kit which is pre-built (the wings, fuselage, and stabilizers are fully constructed and covered in Monokote or painted, etc.) but does not include servos, ESC, or a propeller / EDF. Like the foam ARF, these kits also do not include a radio, receiver, battery or battery charger.
ARF Bundle - Almost Ready to Fly
The TechOne ARF BUNDLE airplane requires intermediate level building skills. Some included components such as servos and motors do not come pre-installed and will need to be installed during the build process. Detailed building instructions are included with each model, however an adhesive product would be required such as a Foam Safe CA or FoamTac glue.
ARF Plus - Almost Ready to Fly
Freewing offers some of its 90mm jets in "ARF Plus" format. Expanding on the normal ARF format above, The ARF Plus format has ALL components installed already, EXCEPT for the motor, EDF unit, and ESC/UBEC. All other components, from the retracts to the servos and lights, are factory installed. The ARF Plus format allows pilots to obtain nearly ready-to-fly jets with most of the components installed, but gives those pilots the option of experimenting with installing their own custom power system, without the need of installing servos and doing the extensive plumbing of servo wires.
Barrel Roll
This refers to an aerobatic maneuver that involves the airplane following the twist of a large imaginary corkscrew (horizontal) through the air by way of rolling the aircraft.
BEC - Battery Eliminator Circuit
Battery Eliminator Circuits are small devices that eliminate the need for a receiver and servo battery pack. They draw higher voltage from the motor batteries and drop it to a voltage level that is suitable for your receiver and servos. This is required in applications which draw high power for multiple servos or use more than 3S motor packs, as most ESCs with linear BECs are not designed for these applications.
Binding
a 2.4GHz receiver needs to be 'bound' to the transmitter before it can receive signals from it. The process involves the Rx identifying a unique code being emitted from the Tx, and then the two components lock together on an available frequency. The process usually only takes a few seconds. Every flyer who binds a 2.4GHz radio and receiver are immediately given their own unique code that is as unique as a fingerprint. This ensures that the flyer will never have a conflict with any other flyer's code.
Imagine 100 flyers all using 2.4GHz radios and receivers flying at the same time at the same field (must be a really big flying field!) without any interference. That's the beauty of 2.4GHz.
BNF ("Bind And Fly")
Bind N' Fly airplanes/quads/helis already come with a receiver so all that is required is for you to bind the receiver to your radio. It is important to make sure that the receiver that comes with the model is compatible with your radio. For instance, if you have a Spektrum transmitter, only a Spektrum receiver will be able to bind it to an aircraft compatible with Spektrum receivers. Most radios and receivers are proprietary and only work together.
Hobbico produces many "TXR" Transmitter Ready aircraft, which are essentially the convenience of a BNF since the pilot just needs to add their compatible Hobbico/Tactic brand radio. Horizon Hobby produces a wide lineup of aircraft sold in the BNF format under the sub-brands "Eflite" and "Parkzone". These aircraft are convenient additions to a pilot's fleet, eliminating the added cost of purchasing a new radio with each new aircraft.
Brushless Motors
Brushless motors have almost completely replaced brushed motors in the RC industry. Their superior power and efficiency make them the obvious choice for powering your RC aircraft. Here’s what you need to know to use them, and some helpful info on how they work.
Brushless Motor Benefits
Before going into how brushless motors work, here’s why they’re useful:
- More Efficient – Brushless motors are much more efficient than conventional brushed motors. This efficiency has been measured to be between 85% to 95% better than brushed motors.
- Less electrical energy is wasted as heat, and more is used to do useful work.
- Reduced Noise – Brushless motors have fewer mechanical parts than brushed motors, so they emit less sound.
- Longer Lifetime – Fewer moving parts are in mechanical contact than in brushed motors, reducing wear.
- Reduced EM Interference – Brushless motors emit less energy as electromagnetic (EM) waves than brushed motors do. This contributes to their efficiency, and helps reduce radio interference.
- Torque, Voltage, And RPM Linearly Related – This means that the amount of torque or RPM produced by the motor divided by the voltage put in is a constant, making it easy to predict how much power you’re going to get.
How Brushless Motors Work
On a fundamental level, an electric motor’s only job is to convert electrical energy (like that provided by a battery) into mechanical energy, like the turning of a propeller or rotor blade. There are two basic facts that allow electric motors to work:
- Electric and Magnetic Fields are Related - That is, every moving charge produces a magnetic field, and magnetic fields can produce electric charge.
- Magnets Interact – Magnets will align when placed near to each other. All electric motors basically consist of two magnets. One of them is permanent, the other is a coil of wire that, when charged, becomes a magnet.
The motor is designed such that the magnetic fields produced by each of the magnets are always out of alignment, causing the motor axil to rotate. This is similar to what happens when you hold a permanent magnet to a compass – the compass swings position so that it lines up with the magnets field.
With the brushed motor design, the magnetic fields are kept out of alignment by turning on the different coils of wire that surround the motor axil in succession. Metal brushes make mechanical contact with the rotating axil and the contacts with each metal coil. As the axil rotates, the brushes contact different coils. The end result is that current flows through different coils at different times, constantly changing the magnetic field and rotating the motor shaft.
It’s here that we see the main problem with the brushed design: the contact between the motor coils and the brushes causes friction, which increases with speed. The metal coils wear out over time, and are prone to sparking. They can also ionize surrounding air, creating ozone. So how can we get around these issues? The answer lies in the brushless motor design. Instead of using mechanical brushes to turn on the various wire coils, an ESC (electronic speed controller) is used instead. The ESC switches the motor coils on or off rapidly, and is synchronized to the motor axial position.
Always look for an ESC with a capacity (measured in amps) greater than that of the motor you’re pairing it with.
Some Common Terms Explained
There are a number of special terms associated with brushless motors. Here are explanations for some of the most common:
-
RPM – This is a measure of angular speed, or how fast something is rotating. A motor’s RPM is simply how fast it can rotate.
-
Kv Rating - Remember how we said that the relationship between voltage, torque, and RPM was linear for a brushless motor? It turns out that the number of RPM provided by each volt is the same, called the Kv number. The Kv number’s useful because it let’s you figure out how many volts you need to achieve a certain RPM, or vice versa. For an example, a 980 Kv motor powered by an 11.1 volt battery would spin at 980 x 11.1 = 10878 RPM with no load. The Kv rating always assumes no load on the motor, so the actual RPM that your achieve will be less than the one you calculate.
-
Continuous / Burst Current – Continuous current measures how much current a motor can handle continuously, for an extended period of time. Burst current measures how much current a motor can handle for a short amount of time, about a few seconds.
-
Current Rating – This is the maximum current that a given motor can handle, measured in amps.
-
Inrunner / Outrunner – These are the two major brushless motor designs. An inrunner brushless motor has stationary coils, and a rotating permanent magnet inside the coils on the motor shaft. An outrunner brushless motor is the opposite, it has a rotating permanent magnet, placed outside the stationary coils on the motor shaft . Outrunner motors have lower Kv ratings, so they run at a lower speed with more torque. This could allow you to direct drive larger props without a gearbox. RC cars and boats tend to require inrunner brushless motors, rather than outrunners.
-
Torque - Torque is a measure of angular force, or how much “push” a rotating shaft has.
-
Watt – This is a measure of power, or how fast energy is used.
- Volt – This measures electric potential, or how much “push” the electrons from a battery have. A greater voltage means that more energy is being applied to a given amount of charge.
Buddy Box
A Buddy Box is one of the best training aids, where the student's transmitter is attached via cable (or wireless for newer radios) to the instructor's. The student has complete control over the airplane, but at the flick of a switch the instructor can take control if the student gets into a situation that may result in loss of aircraft.
Bulkhead
The Bulkhead is the foremost former of your airplane on to which the engine is mounted. Also called a firewall.
CA Glue
Cyanoacrylate (CA for short) is the generic name for a family of fast-acting adhesives, sometimes referred to as "Super Glue." CA comes in three varieties: thin, medium, and thick. These terms refer to the viscosity and gap filling properties of the glue. Thin CA is used to join materials which are tight fitting. Medium CA has minor gap filling properties and is a good all-around choice for hobby use. Thick CA can be used to fill larger gaps and is slightly more flexible than the thin and medium weight products.
IMPORTANT - if you are using CA for foam airplanes, make sure to use a "Foam Safe CA" as some foams will melt / deform if general purpose CA is applied to their surface.
CG - Center of Gravity
CG is short for Center of Gravity. In reference to radio controlled aircraft, the CG is the ideal balance point for your aircraft to achieve level, stable flight in normal conditions. Each manufacturer will provide a recommended CG in their user manual as a starting point of reference. Some more advanced flyers prefer their plane not to be in perfect balance, and will add more weight to the aircraft to make it “tail heavy” or “nose heavy” depending on their preference.
Channel Mixing
Channel mixing is when two separate channels are made to operate in conjunction with one another. For example, you could program an aileron and rudder mix whereby the rudder automatically moves a set amount when the ailerons are deflected. Or you could have elevators automatically drop when flaps are activated.
Continuous / Burst Current
Continuous current measures how much current a motor or battery can handle continuously, for an extended period of time. Burst current measures how much current a motor or battery can handle for a short amount of time, about a few seconds.
Control Horn
This is a plastic or metal piece that is attached to a control surface, onto which the servo linkage is connected to by way of pushrod and clevis.

Control Surface
The control surface on an aircraft is the term used to describe the moving part of any flying surface such as the rudder, elevator and ailerons. These are all control surfaces.
Control Surface Mixing
Something that is possible on a computer-based transmitter only, control surface mixing is a single pair of control surfaces made to act as two separate pairs would. A common example of control surface mixing is to combine elevator and aileron deflection into 'elevons', on a flying wing type rc aircraft such as the F-117, B-2 Spirit or any delta or flying wing.
In this case, the transmitter is operated normally but the single pair of control surfaces combine the two different deflections in accordance with the Tx stick movements and so move together, as elevators do, and individually as ailerons do. Other similar control surface mixing includes flaperons (mixing aileron & flap deflection) and spoilerons (mixing aileron & spoiler deflection).
Crosswind
A crosswind is when the wind is blowing at, or approximately, 90 degrees to your line of flight, take off or landing. A crosswind takeoff or landing is more challenging as you have to negotiate the proper control surfaces to compensate for the crosswind.
Crow
Crow is a name given to a type of air-braking method common on rc gliders, whereby the flaps go down and the ailerons go up simultaneously. The lowered flaps create high drag, while the raised ailerons reduce lift, this combination makes landing a fast glider more easy.
C Rating - Discharge Rate
Discharge rate is simply how fast a battery can be discharged safely. In the RC LiPo battery world it is called the “C” rating. A battery with a discharge rating of 10C would mean you could safely discharge it at a rate 10 times more than the capacity of the pack, a 15C pack = 15 times more, a 20C pack = 20 times more, and so on.
Let's use a 1000 mAh battery as an example; if it was rated at 10C that would mean you could pull a maximum sustained load up to 10,000 milliamps or 10 amps off that battery (10 x 1000 milliamps = 10,000 milliamps or 10 amps). From a time stand point, this equals 166 mAh of draw a minute so the 1000 mAh pack would be exhausted in about 6 minutes.
Most RC LiPo Battery packs will show the continuous C rating and some are now indicating a burst rating as well. A burst rating indicates the battery discharge rate for short bursts of extended power. The higher the C rating, usually the more expensive the battery. This is where you can save some money. Getting an extremely high discharge rated pack when there is no way you could possibly pull the full amount of power is not required. The most important thing is you can't go with too low a discharge C rating or you will damage your battery and possibly your ESC (electronic speed control). As a very general guide line, 25C to 30C discharge rated packs are the norm for most RC aircraft.
Dead Stick
Dead Stick is commonly referred to when your airplane's motor cuts out unexpectedly in mid-air. With any luck you'll have enough altitude to glide safely in for a nice landing. Sometimes pilots will "dead stick" their airplane by dropping their throttle to idle on purpose in the event they need to lower airspeed on final approach or bleed off airspeed in order to land before running out of runway.
This is usually due to being too "High and Hot", a term for having a glideslope too high for a normal landing, at an airspeed too fast to make the target touchdown area.
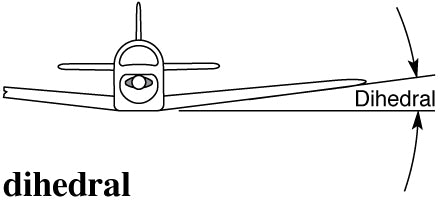
Dihedral
Dihedral is the upward angle of the wings when viewed from the front. An airplane with dihedral is more stable in the air than one without. Both high-wing and low-wing airplanes may have dihedral to help with overall stability.
Drag
Drag is the force that is created by the movement of the airplane through the air, on the air immediately surrounding the plane. Higher drag means that the plane has to work harder to cut through the air.
DSM/DSM2/DSMX
This refers to a type of technology developed by Spektrum for their spread spectrum 2.4GHz rc systems. Stands for Digital Spectrum Modulation, the '2' and the 'X' just being the updated versions of the original. Just one of many branded abbreviations for particular 2.4GHz rc technology names.
Dual Rates
Dual rates enable the control surface deflection limits to be changed, while still retaining full stick movement. So you could have 'high' deflection (or "High Rates"), plus a setting for decreased deflection limits at full stick movement (or "Low Rates").
Most flyers prefer to setup dual rates so they can enjoy maximum movement (for 3D or aerobatics as an example) or a lower setting for easier control of a "twitchy" aircraft, or for the takeoff and landing sequence.
Elevator
An Elevator is the flight control surface usually at the rear of an aircraft, which control the aircraft's orientation by changing the pitch of the aircraft, and so also the angle of attack of the wing. In simplified terms, they make the aircraft nose-up or nose-down.
Elevons
When elevator and aileron control is made by the same control surface, this surface is called an elevon. Only possible with a channel mixing option on the transmitter. Elevons are common on delta-wing aircraft such as "flying wings", the F-117, B-2 Spirit, etc.
Empennage
The empennage (em-puh-nage) also known as the tail or tail assembly, of most aircraft gives stability to the aircraft, in a similar way to the feathers on an arrow; the term derives from the French for this. Most aircraft feature an empennage incorporating vertical and horizontal stabilizing surfaces which stabilize the flight dynamics of yaw and pitch, as well as housing control surfaces.

ESC - Electronic Speed Control
An electronic speed control or ESC is an electronic circuit with the purpose to vary an electric motor's speed, its direction and, in some cases, act as a dynamic brake. An ESC can be a stand-alone unit which plugs into the receiver's throttle control channel or incorporated into the receiver itself, as is the case in some micro or RTF aircraft.
Many aircraft 24" or larger in wingspan use ESCs with an integrated BEC. The BEC powers the receiver and servos, via the same throttle wire coming out of the ESC which is plugged into the Throttle channel on your receiver. This is a convenient way to power your receiver and servos, without the need for a receiver battery. Receiver batteries are still used in the RC hobby, primarily for liquid fuel powered aircraft, or larger electric aircraft above 7-8 pounds in weight.
Expo
Expo lets you reduce (or increase) control surface movement around the central stick movements, effectively making the control surface movement disproportional to your stick movements. This is a way to "soften" the stick sensitivity around center. This helps the aircraft be less "twitchy". You still have the full range of control input from the edges, just that the area around center is softened to decrease sensitivity so your aircraft doesn't look like it consumed too much coffee that morning.
Flaperons
Flaperons is a single control surface on the trailing edge of each wing that does the job of flaps and ailerons. An rc system with control mixing capability is needed to have flaperons. Used commonly on rc sailplanes but can be mixed for most any aircraft to increase lift/drag to slow the aircraft and lower the stall speed.
Flaps
Flaps are devices used to alter the lift characteristics of a wing and are mounted on the trailing edges of the wings of a fixed-wing aircraft to reduce the speed at which the aircraft can be safely flown and to increase the angle of descent for landing. They shorten takeoff and landing distances. Flaps do this by lowering the stall speed and increasing the drag.
Extending flaps increases the camber or curvature of the wing, raising the maximum lift coefficient — the lift a wing can generate. This allows the aircraft to generate as much lift, but at a lower speed, reducing the stalling speed of the aircraft, or the minimum speed at which the aircraft will maintain flight. Extending flaps increases drag, which can be beneficial during approach and landing, because it slows the aircraft. On some aircraft, a useful side effect of flap deployment is a decrease in aircraft pitch angle which lowers the nose thereby improving the pilot's view of the runway over the nose of the aircraft during landing. However the flaps may also cause pitch-up depending on the type of flap and the location of the wing.
Flare
Flaring is the action taken in the last few seconds of the landing approach, right before touchdown, to reduce the approach angle and slow the rate of descent.
The flare is crucial in "softening the blow" to the wheels and struts and the rest of the airplane. Hard landings from a lack of flare can stress or fracture components and the airframe itself.
Fore
Fore in aviation refers to the front or foreward section of an aircraft.
"The firewall is fore of this airplane's CG".
Fuselage
The fuselage is the main body of an airplane, excluding wings, tail and everything else.
Gyroscopic Precession
This is the tendency of a spinning object to precess or move about its axis when disturbed by a force. The engine and propeller act as a big gyroscope. However, gyroscopic precession is likely to be minimal in a typical aircraft.
Gyroscopic precession is frequently confused with p-factor.
Hand Launch
Hand launching or hand tossing is the way to launch any flying aircraft without landing gear. The model should be held level at the bottom of the fuselage close to the aircraft's CG at head-height and launched into wind with a slight high Angle of Attack. Velocity of the toss is proportional to how powerful the aircraft's power system is.
Under-powered EDF jets will need a harder toss than say a propeller-driven plane with a light wing load.
Horizontal Stabilizer
Also called the tailplane. The horizontal surface at the back of the fuselage, to which the elevators are attached. It's a tailplane's job to generate a downward force, to counteract the natural tendency for a plane to want to nose-dive into the ground.

Inrunner / Outrunner
These are the two major brushless motor designs. An inrunner brushless motor has stationary coils, and a rotating permanent magnet inside the coils on the motor shaft. An outrunner brushless motor is the opposite, it has a rotating permanent magnet, placed outside the stationary coils on the motor shaft .
Outrunner motors have lower Kv ratings, so they run at a lower speed with more torque. This could allow you to direct drive larger props without a gearbox. EDF jets tend to require inrunner brushless motors, rather than outrunners.
KIT
The only non-acronym in the list, a kit simply means an aircraft that requires your own choice of electronics to install in the airframe. Most kits require you to purchase all of the electronics separately (motor, servos, ESC, and sometimes additional accessories). Kits are for folks who either prefer a true build process and/or prefer to put their own choice of electronics in the aircraft.
KIT+
Freewing offers some of its 90mm jets in "KIT+ format, also known as "KIT PLUS". Expanding on the normal KIT, The KIT+ format has ALL components installed already, EXCEPT for the motor, EDF unit, and ESC/UBEC. All other components, from the retracts to the servos and lights, are factory installed. The KIT+ format allows pilots to obtain nearly ready to fly jets with most of the components installed, but gives those pilots the option of experimenting with installing their own custom power system, without the need of installing servos and doing the extensive plumbing of servo wires.
Kv Rating
Kv rating (not to be confused with kilo-volt) is the RPM of the motor (k) per volt (V) with no load. For example, a brushless motor with a Kv rating of 3000 powered by a 12V power source would be capable of 36,000 RPMs (multiply 3000x12). This is the max RPMs that this motor can reach under no load. A motor with a higher Kv will have more top end speed, but not as much acceleration/torque. A motor with a lower Kv will not be as fast, but will accelerate faster.
Landing Gear
In rc flying, landing gear is the portion under the airplane that is allows the airplane to land on wheels. This may include struts, wheels, retracts, tail wheel and their associated mechanisms.
Landing gear can be fixed or retractable up into the underside of the wing or fuselage (called 'retracts', usually only found on planes with 5 channels or more).
Leading Edge
The leading edge refers to the front edge of the wing, horizontal stabilizer, rudder or any control surface.
Lipo Battery
Lithium Polymer or Lipo batteries are the standard rechargeable battery type used in today's RC products. LiPo's have significant benefits over Nickel-metal Hydride (NiMH) or Nickel-cadmium (NiCd) including lighter weight, increased run time, and higher number of charge cycles. The nominal voltage of each LiPo cell is 3.7V. Here are the nominal voltages of the most popular size LiPo batteries:
LiPo Nominal Voltage (Resting)
1 Cell (1S) 3.7V
2 Cell (2S) 7.4V
3 Cell (3S) 11.1V
4 Cell (4S) 14.8V
6 Cell (6S) 22.2V
While the nominal voltage is the standard voltage labeling on most LiPo batteries, the maximum voltage of LiPo batteries is an important data point which shows you when you batteries are fully charged. Your battery charger will typically cutoff it's charge cycle when it reaches the maximum voltage of each LiPo cell; 4.2V per cell. Here are the maximum voltages of LiPo RC batteries:
LiPo Maximum Voltage (Fully Charged)
1 Cell (1S) 4.2V
2 Cell (2S) 8.4V
3 Cell (3S) 14.8V
4 Cell (4S) 16.8V
6 Cell (6S) 25.2V
Loop
An aerobatic maneuver where the airplane flies a vertical circle in the air. The easiest stunt of all to pull off, and any airplane with an elevator can do them. The main thing to remember is to perform the maneuver high enough so the airplane doesn't hit the ground coming out of the loop. (That would be bad).
Loss of Orientation
Loss of Orientation is when you lose sight of which way up your rc airplane is and what it's doing, either because it's too far away to see properly, doesn't have a paint scheme that is easy to tell top or down orientation or because of low light levels, or you've just flown it directly over your head and momentarily lost all visual reference to everything. It happens to all rc pilots from time-to-time and is not the best feeling to have in the hobby.
Mixing
Mixing is the ability to combine two different rc functions into one. See Control Surface Mixing and Channel Mixing.
Mode 1
Mode 1 refers to the set-up of the transmitter where the left stick operates the elevator and rudder, and the right stick operates the throttle and ailerons. This is a less-common mode for transmitter layout. See Mode 2 for the typical setup.
Mode 2
Mode 2 refers to the set-up of the transmitter where the left stick operates the throttle and rudder, and the right stick operates the elevator and ailerons. This is the most common transmitter mode.
Moment
Moment is the tendency of an object to rotate or pivot about a point. The further an object is from this point, the greater the force it exerts.
Non-Scale
Non-scale refers to any model aircraft that is not modeled from a real-life aircraft. Non-scale aircraft are made up designs.
Parallel / Series
Sometimes you may find the need to connect more than one Li-Po battery together in your aircraft. There are two primary methods to connect more than one Li-Po battery to your aircraft. It is important to learn the difference between the two. You are either trying to double the voltage while maintaining the same capacity rating or double the capacity while maintaining the voltage of one of the batteries.
Connecting in Parallel
When connecting in Parallel you are doubling the capacity (amp hours) of the battery while maintaining the voltage of one of the individual batteries. This would be used in aircraft you are wanting to increase the mAh, or time you have to fly. Two 3S 2200 mAh Li-Po batteries in Parallel will be giving you the equivalent of a single 3S battery with 4400 mAh capacity, to in theory double your flight time. Use a jumper wire between the positives of both batteries and another jumper wire between the negatives of both batteries. Connect your positive and negative wires to the same battery to run to your application.
Connecting in Series
When connecting your batteries in Series you are doubling the voltage while maintaining the same capacity rating (amp hours). This might be used in a larger-sized EDF jet where you wish to bump up from a 6 Cell setup to perhaps an 8 Cell setup. In this example you would connect a 6 Cell with a 2 Cell in Series. Just use a jumper wire between the negative of the first battery and the positive of the second battery. Run your negative wire off of the open connector from the first battery and your positive off of the open connector on your second battery.
Park Flyer
Park Flyers are rc electric model aircraft that are in the smaller-sized class that are safe to fly in areas like parks, schools and parking lots.
Micros, small jets, 700-1200mm aircraft typically fall into this category. In some cases 1400mm aircraft can be considered park flyers but generally the larger and more powerful the aircraft, the less likely you can fly it in smaller spaces.
P-Factor
P-factor is the term for asymmetric propeller loading, that causes the airplane to yaw to the left when at high angles of attack.
Assuming a clockwise rotating propeller it is caused by the descending right side of the propeller (as seen from the rear) having a higher angle of attack relative to the oncoming air, and thus generating a higher air flow and thrust than the ascending blade on the left side, which at the other hand will generate less airflow and thrust. This will move the propellers aerodynamic centre to the right of the planes centreline, thus inducing an increasing yaw moment to the left with increasing angle of attack or increasing power. With increasing airspeed and decreasing angle of attack less right rudder will be required to maintain coordinated flight.
This occurs only when the propeller is not meeting the oncoming airflow head-on, for example when an aircraft is moving down the runway at a nose-high attitude (in essence at high angle of attack), as is the case with tail-draggers. Aircraft with tricycle landing gear maintain a level attitude on the takeoff roll run, so there is little P-factor during takeoff roll until lift off.
When having a negative angle of attack the yaw moment will instead be to the right and and left rudder will be required to maintain coordinated flight. However negative angles of attack is rarely encountered in normal flight. In all cases, though, the effect is weaker than prop wash.
Pilot Error
Pilot error is any mistake, particularly one that ends in a crash, made by the pilot for whatever reason. Numerous reasons can cause pilot error. Wind shifting, loss of orientation, depth perception problems, misjudging the landing speed, stalling, etc.
Tongue-and-cheeck-ingly also known as "Dumb Thumbs".
Pitch
Pitch is the angle of a wing, propeller blade or helicopter rotor in relation to the airflow over it. The pitch angle of a moving wing or blade is known as the Angle of Attack. The elevator is the control surface that controls pitch in an aircraft.
PNP ("Plug And Play")
Plug N' Play simply means that your own transmitter, receiver and battery is required to fly. PNP planes already come with motor, ESC, servos (and many times these days with retracts, LED lights and flaps as well) all pre-installed. So what is left once you put the plane together is to add your own receiver, bind it to your radio, charge your battery and then it is ready for flight.
Port
Not just a fine dessert wine, Port in aviation refers to the left side of the aircraft.
Pre-flight Check
The purpose of performing a pre-flight check is to ensure that your rc plane is in flying-ready condition, and that everything is working as it should be.
Refer here for more information on how to properly pre-flight check your airplane.
Propeller
A propeller is a type of fan that transmits power by converting rotational motion into thrust. A pressure difference is produced between the forward and rear surfaces of the airfoil-shaped blade, and a fluid (such as air or water) is accelerated behind the blade.
"Prop" is the common abbreviation for propeller.
Pushrod
A pushrod (also known as servo linkage) is the piece of metal or plastic rod that connects a servo arm to its control surface or function. Clevises are commonly used at the ends of the linkages, to clip to the servo/control horns.

RTF ("Ready To Fly")
Airplanes that are RTF come with everything you need to fly. A transmitter, battery, charger and receiver are all included along with the airplane so usually all you need to do is charge your battery, put the wings/stabilizer(s) on (in some cases you don't even have to do that) and you're ready for flight.
Radio
New pilots often purchase an RTF (Ready-To-Fly) bundle which includes a basic radio to get them started with that specific beginner plane. Once a pilot decides to move forward in the hobby, his/her first purchase is usually a proper computer radio transmitter. Modern computer radios can store many different models in their memory, from 20-250+ depending on the radio. This allows pilots to grow their aircraft fleet to 5, 10, 20, or more aircraft, and still use only one radio to control them all. Don't be the person at your flying field with ten different aircraft and ten different radios!
Beyond their ability to control multiple aircraft, computer radios also expand the features available to pilots. Setting a flight timer, programming different control throws ("Rates") or control sensitivity ("Expo"), or setting up different wing types like Delta wings or flaperons or canards, are just a handful of the features accessible to pilots with a modern computer radio.
MotionRC carries the top brands in the RC business which are the most suitable for the class of aircraft we sell. Futaba, Spektrum, Hitec, and Tactic are among the world's most respected, utilized, and supported radio transmitter brands. Generally, with the exception of using a device called AnyLink in specific situations, most brands of radio are only compatible with their same brand of receiver. So think of the radio/receiver as a combo. The choice of which brand to go with is a significant choice, because once you choose a brand, you will likely never change to another brand.
A helpful tip when deciding which brand of radio/receiver to choose for your RC hobby experience is to look at what other pilots at your local flying field are using. If your friends are flying a Spektrum radio and enjoy it, for example, then it would be advised that you consider a Spektrum radio because your friends will be able to help you navigate its menus more easily. This is important because learning how to operate all of a radio's functions can be one of the most time consuming tasks in this hobby, and menu navigation is specific to each brand/model.
A popular abbreviation is "TX" or "Tx".
Range Check
Range checking is the act of checking the signal strength of your transmitter and receiver. The best way to do this is have a spotter that stands next to your aircraft while you walk 100 feet or more away from your aircraft, then using your controls to ensure they are responding as they should even at a good distance away. The spotter can verify the control surface movements with your inputs.
You want to make sure there are no signal strength issues between your radio and your aircraft. Never attempt flying your aircraft, especially for the first time, without range checking.
RC
RC is the acronym for Remote Control or even Radio Control.
RC Flight Simulator
RC Flight Simulators are training software that allow you to learn how to fly or polish your skills using a transmitter (either the software's transmitter or your own depending on the type of software) in the comfort of your home using a PC or laptop. Tremendous training aids and a great way to improve your skills without risking crashing your real aircraft. Also a great way to still fly regardless of how poor the weather is outside.
Click here to see our selection of RC flight simulators.
Receiver
The receiver is the small device inside your aircraft that picks up the signals coming from your transmitter to provide power and control surface deflection based on your stick inputs.
A popular abbreviation is "rx" or "Rx".
Retracts
Retracts refer to the mechanism that allows the cycling of landing gear up and down for takeoffs and landings. A scale feature on many model aircraft today, retracts decrease drag when you don't want extra drag like during flight.
Motion RC carries servoless, electric retracts. A drop-in system for many model aircraft.
Roll
Roll is the rotational movement of an airplane about its longitudinal axis. Also an aerobatic maneuver whereby the airplane is rolled about its longitudinal axis through 360 degrees.
Ailerons control the roll of an aircraft.
RPMs
RPMs (Revolutions Per Minute) is a measure of angular speed, or how fast something is rotating. A motor’s base RPM number is simply how fast it can rotate per minute.
Rudder
An aircraft's rudder is part of the vertical stabilizer at the rear of an aircraft. A rudder hinged to swap left and right, causing the aircraft to yaw. Certain trainer aircraft use rudder control to turn an aircraft slowly and flatly, instead of using ailerons, which can roll an aircraft too quickly for a beginner pilot to easily control. On tail-dragger aircraft, such as the popular P-51 Mustang or the J-3 Cub, holding a bit of right rudder during a takeoff roll helps to counteract an aircraft's tendency to roll to the left (also known as "torque roll", which can quickly cause a crash if the appropriate amount of rudder is not used).
A rudder is essential in establishing coordinated turns. With the use of rudder in conjunction with the aileron, the rudder guides the plane's nose in the direction of the turn. This is called establishing a "coordinated turn".
Roll Out
The roll out is the distance your aircraft travels from the point it touches the ground on landing until it comes to a stop.
Rotation
Rotation refers to the act of applying back pressure to the elevator controls to lift the aircraft off the ground once the proper airspeed has been established.
Rx
Rx or RX is an abbreviation for the receiver.
Scale
Scale refers to any model aircraft that has been modeled from a real aircraft, such as a F/A-18 Hornet or F4U Corsair as an example.
Scale details refer to any part of the scale model aircraft that can be found on the full scale version such as retracts, flaps, sequenced gear doors, NAV lighting, etc.
Scale Fidelity
Scale Fidelity in the rc model aircraft world is referring to an aircraft that has intricate or detailed amenities in relation to the full scale version.
For instance, a model with sequenced gear doors, retracts, NAV lighting, slats and/or flaps, air brakes, a detailed cockpit and pilot, a true scale outline among many other items would be considered a model with high "scale fidelity" over a model aircraft without those items.
Freewing's new T-5, as an example, is a high scale fidelity model aircraft.

Semi or Sport Scale
Semi or Sport Scale refers to a model aircraft that is loosely based on the full scale version, proportions not precise, or is missing scale details like flaps, gear doors, retracts, lights and other various details.
S-FHSS
Futaba's answer to Spektrum's DSM technology. Stands for Frequency Hopping Spread Spectrum and uses warp-speed frequency hopping to ensure no breakdown of signal.
Servo
A servo is the part of the radio control gear that converts the radio signal into movement. Each control surface has a servo that allows the control surface to move for proper flight control.
A servo generally consists of a printed circuit board (PCB), an electric motor, a feedback potentiometer and a set of either nylon or metal gears that may or may not be ball-raced, all housed within a plastic casing.
The central shaft on which the gears sit is splined and exits through the top of the servo casing; the servo horn (output arm) is connected to the shaft and is held in place by a small screw.

Spin
A spin is a special category of stall resulting in autorotation about the vertical axis and a shallow, rotating, downward path. Spins can be entered intentionally or unintentionally, from any flight attitude if the aircraft has sufficient yaw while at the stall point. In a normal spin, the wing on the inside of the turn is stalled while the outside wing remains flying; it is possible for both wings to be stalled but the angle of attack of each wing, and consequently its lift and drag, will be different. Either situation causes the aircraft to autorotate (yaw) toward the stalled wing due to its higher drag and loss of lift. Spins are characterized by high angle of attack, an airspeed below the stall on at least one wing and a shallow descent. Recovery may require a specific and counterintuitive set of actions in order to avoid a crash.
Spinner
The spinner is the plastic or aluminium cone-shaped piece that covers the center of the propeller.
Sport Airplanes
Sport airplanes is a general term for model airplanes that can be used for training on but are also capable of aerobatic maneuvers.
Spread Spectrum
Spread spectrum refers to the latest technology for radio control systems. Based on the 2.4GHz frequency band, spread spectrum radio systems are virtually interference-proof.
Stall
A stall is a reduction in the lift coefficient generated by a foil as angle of attack increases. This occurs when the critical angle of attack of the foil is exceeded. The critical angle of attack is typically about 15-18 degrees, but it may vary significantly depending on various factors.
Stalls in fixed-wing flight are often experienced as a sudden reduction in lift as the pilot increases the wing's angle of attack and exceeds its critical angle of attack (which may be due to slowing down below stall speed in level flight). A stall does not mean that the motor(s) have stopped working, or that the aircraft has stopped moving — the effect is the same even in an unpowered glider aircraft.

Stall Turn
Stall turn is an aerobatic maneuver where the airplane is put into a short vertical climb. At the top of the climb, power is reduced and full rudder is applied. The airplane should stop and turn through 180 degrees, pivoting on its tail in whichever direction rudder was applied. Then you need to pull out of the ensuing dive.
Starboard
Starboard in aviation refers to the right side of the aircraft.
Straight and Level
Straight and Level flight is when your rc airplane is flying in a straight line, with no fluctuation in roll, pitch or yaw. A well trimmed airplane should fly straight and level with the transmitter control surface sticks in their central positions.
Taildragger
A taildragger is any aircraft that has two main wheels in the general area of the aircraft's CG and a single small tailwheel at the back of the aircraft. Many high wing and warbird aircraft are considered taildraggers.


Tail Wind
A tail wind refers to wind direction coming from behind your aircraft. You always want to takeoff and land into a head wind wherever possible. Flying in a tail wind increases airspeed but also stall speed.
Take Off
The take off is the act of accelerating your aircraft down a runway until reaching a certain airspeed which allows you to lift the aircraft off the ground and into the air (also known as the rotation).
Thrust
Thrust is the force that is generated by the spinning propeller or fan/turbine of the airplane, and pushes/pulls the aircraft through the air.
Trailing Edge
Trailing edge refers to the rear edge of the wing, tailplane, control surface or other aircraft element.
Trainer
A trainer is an aircraft specifically designed for beginner rc pilots. Generally, trainers are slow flying, robust aircraft with a high wing.
Due to advancements in technology, trainers can also be low wing, warbirds or micro jets thanks to features that are specifically tailored for new pilots starting out.
Transmitter
Transmitter is a term (aka "radio") for the device that the rc pilot holds to fly aircraft. For more information see "Radio".
Tri-Gear
Tri-Gear (short for "Tricycle Gear") refers to airplanes that have nose gear in the front of the aircraft and two main gear near the middle of the aircraft. Aircraft with tri-gear are considered easier to takeoff and land with than taildraggers.
The P-38 Lightning was one of the only WWII warbirds with tri-gear.

Trimming
Trimming is the act of adjusting your airplane's control surfaces in flight with the goal to be able to obtain straight and level flying with hands off the controls. Every transmitter has trim tabs close to the control sticks that allows you to adjust roll, pitch or yaw during flight.
Trimming is best performed with little to no winds so you can see the true effect of the trim on each control surface. If your airplane is banking to the left you would enter as many right clicks on the aileron trim tab as needed until the left bank is cancelled and the wings are now straight and level. The same method would apply for pitch and yaw.
Tx
Tx or TX is the abbreviation for the transmitter.
UBEC
UBEC is an acronym meaning Universal Battery Eliminating Circuit, a common name for standalone BECs. When an ESC's built-in BEC isn't strong enough for the aircraft's needs (for example, if your airplane has high current servos) then a more powerful standalone UBEC can be used instead. Common in larger rc planes.
RXR ("Receiver Ready")
RxR just likeTxR refers to a series of aircraft developed by Hobbico that work with anyTactic, Hitec or SLT radio. Instead of having a receiver pre-installed, you would need your own receiver.
Servos
RC Servos are small, cheap, mass-produced servomotors or other actuators used for radio control. Servos in RC aircraft are used primarily to control all moving parts such as ailerons, elevator, rudder, flaps, gear doors, and other items.
Most servos are rotary actuators although other types are available. Linear actuators are sometimes used, although it is more common to use a rotary actuator with a bellcrank and pushrod. A typical servo consists of a small electric motor driving a train of reduction gears. A potentiometer is connected to the output shaft. Some simple electronics provide a closed-loop servomechanism.
Slats
Slats are aerodynamic surfaces on the leading edge of the wings of fixed-wing aircraft which, when deployed, allow the wing to operate at a higher angle of attack. A higher coefficient of lift is produced as a result of angle of attack and speed, so by deploying slats an aircraft can fly at slower speeds, or take off and land in shorter distances. They are usually used while landing or performing maneuvers which take the aircraft close to the stall, but are usually retracted in normal flight to minimize drag.
Freewing is introducing slats as an amenity in some of their future EDF jets including the T-45.
Another exciting element of the hobby these days are the addition of aerodynamic features like slats that have only been seen on full size aircraft or high end composite/turbine jets now becoming available in the foam class of RC aircraft.
Spoilers
In aeronautics, a spoiler (sometimes called a lift dumper) is a device intended to reduce lift in an aircraft. Spoilers are plates on the top surface of a wing that can be extended upward into the airflow to spoil it. By so doing, the spoiler creates a controlled stall over the portion of the wing behind it, greatly reducing the lift of that wing section. Spoilers differ from airbrakes in that airbrakes are designed to increase drag without affecting lift, while spoilers reduce lift as well as increasing drag.
Spoilers fall into two categories: those that are deployed at controlled angles during flight to increase descent rate or control roll, and those that are fully deployed immediately on landing to greatly reduce lift ("lift dumpers") and increase drag. In modern fly-by-wire aircraft, the same set of control surfaces serve both functions.
Spoilers are used by nearly every glider (sailplane) to control their rate of descent and thus achieve a controlled landing. An increased rate of descent can also be achieved by lowering the nose of an aircraft, but this would result in increased speed. Spoilers enable the approach to be made at a safe speed for landing.
Torque
Torque is a measure of angular force, or how much “push” a rotating shaft has.
Propeller torque effect
Torque effect is the influence of engine torque on aircraft movement and control. It is generally exhibited as a left turning tendency in piston single engine propeller driven aircraft.
According to Newton's law, "for every action there is an equal and opposite reaction," such that the propeller, if turning clockwise (when viewed from the cockpit), imparts a tendency for the aircraft to rotate counterclockwise. Since most single engine aircraft have propellers rotating clockwise, they rotate to the left, pushing the left wing down.
Typically, the pilot is expected to counter this force through the control inputs. To counter the aircraft roll left, the pilot applies right aileron.
It is important to understand that torque is a movement about the roll axis. Aileron controls roll. Prop torque is not countered by moving the rudder or by setting rudder trim. It is countered by moving or trimming the aileron.
This correction induces adverse yaw, which is corrected by moving or trimming the rudder (right rudder).
On aircraft with contrarotating propellers (propellers that rotate in opposite directions) the torque from the two propellers cancel each other out, so that no compensation is needed.
TXR ("Transmitter Ready")
TxR refers to a series of aircraft developed by Hobbico that work with any Tactic, Hitec or SLT radio and comes with an SLT receiver. If you wish to fly TxR with a non-compatible radio (like Spektrum as an example) you can either remove the SLT receiver that comes with the aircraft and put your own compatible receiver in, or you can purchase the AnyLink2 radio adapter that allows your radio to communicate with the SLT receiver.
Vertical Stabilizer
The vertical stabilizers' job is to provide stability for the aircraft, to keep it flying straight. The vertical stabilizer keeps the nose of the plane from swinging from side to side, which is called yaw. Also known as the "tail" or "fin". In most cases the rudder is housed on the trailing edge of the vertical stabilizer.
Washout
Washout is a change in an airfoil's angle of incidence, measured from the root to the tip. If you look closely at a wing with washout, you'll see that it twists from the root to the tip, with the root having a higher angle of incidence than the tip.
What does this mean when you're flying? It means that at any airspeed, at any attitude, the root of the wing root will fly at a higher angle-of-attack than the wing tip.
Why Do Wings Need Washout?
Why would engineers want pilots to have an airplane flying around with twisted wings? It has everything to do with a stall. When the root (inboard section) of a wing flies at a higher angle-of-attack, it also means the root will reach the critical angle-of-attack sooner than the tip, and it will stall first.
A root stall is what you want to happen in nearly all airplanes. When an aircraft stalls at the root first, it means there is enough airflow over the tips of the wings to prevent any rapid rolling motion during a stall, which makes the airplane more stable, as well as making it more resistant to entering a spin. A root stall also ensures some aileron effectiveness during the stall, giving you greater control of the plane, especially if the stall occurs in a banked turn.
If your plane didn't have washout, in most cases it would mean the entire wing would stall at once, or worse yet, during a turn when you have aileron deflection in, the wing tip could stall first. And if that happened, your plane could aggressively roll left or right during the stall, and possibly enter an incipient spin.
Wingspan
The wingspan is the length of a wing from tip-to-tip. A primary method to determine an rc airplane's overall size, the unit of measurement is either in millimeter (mm) or inches (") or both.
Wing Loading
In aerodynamics, wing loading is the loaded weight of the aircraft divided by the area of the wing. The faster an aircraft flies, the more lift is produced by each unit area of wing, so a smaller wing can carry the same weight in level flight, operating at a higher wing loading. Correspondingly, the landing and takeoff speeds will be higher. The high wing loading also decreases maneuverability.
High Wing Loading versus Low Wing Loading
If a plane has a low mass but has rather large wings, it will have low wing loading, for example, gliders have low mass with large wings and therefore have low wing loading.
A plane with large body mass and small wings consequently has high or heavy wing loading. An F4 Phantom has a large mass with comparatively small wings. It has heavy wing loading.
Wings generate lift due to the flow of air over the wing surface. Larger wings move more air, so a plane with a large wing area relative to its mass (low wing loading) will have more lift at any given speed. Therefore, a plane with lower wing loading will be able to take off and land at a lower speed (or be able to take off with a greater load). It will also be able to turn faster.
Wing Root
The wing's root is the location where the wing meets the fuselage. CG is best measured where the wing's leading edge meets the root.
Wind Sock
A wind sock is a large material cone-shaped tube, horizontally mounted on a tall pole at the flying field, that indicates the direction of the wind. Important because rc airplanes need to be taken off and landed into the wind where possible, so the pilot needs to know the wind direction.
Yaw
Yaw is the side-to-side movement of an aircraft that is controlled with the rudder (pushing the nose left or right).



- Choosing a selection results in a full page refresh.
- Press the space key then arrow keys to make a selection.